





佐藤 正隆知能機械工学専攻 博士前期課程
研究テーマ:家庭用双腕サービスロボットの開発
活動の概要
近年、少子高齢化や共働き世帯の増加に伴い、家庭内において家事作業支援を行うサービスロボットの必要性が高まっている。現在実用化されているサービスロボットの多くは、コミュニケーション機能に特化したものであり、家事作業を支援するロボットは、まだ実用化されていない。家庭内でロボットを使用する際にコミュニケーションは重要な機能の一つであるが、一般的な家庭で使うサービスロボットには、実用的な機能を持ったロボットも求められている。
現在実用化されている双腕ロボットの多くが産業用であり、家庭内での家事支援には適していない。家庭内での作業支援目的のロボットの例として産業技術総合研究所が開発しているHRP3やホンダのASHIMOのようなロボットが挙げられるが、これらは未だに開発途中であり、実際に開発されたとしても非常に高価となることが予想されるため、家事支援ロボットに適しているとは言えない。
本研究では、家事作業支援機能として炊事・洗濯・掃除といった機能を有し、かつできるだけ安価に製作することのできる双腕サービスロボットの開発を目標としている。今回の派遣では、研究の第一段階として、ロボットの腕の各関節の要求仕様を決定し、この仕様に基づいて各関節の機構要素の配置の検討を行い、機構設計を行った。
研究成果概要
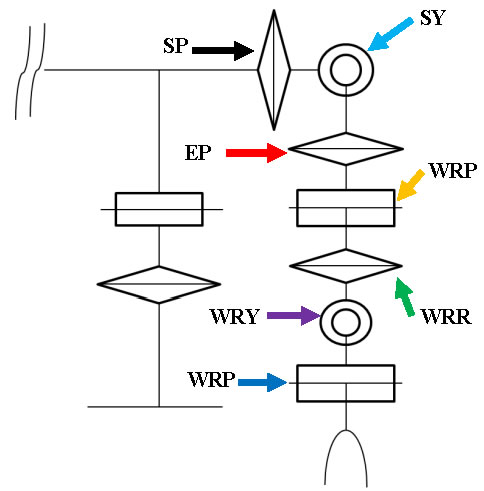
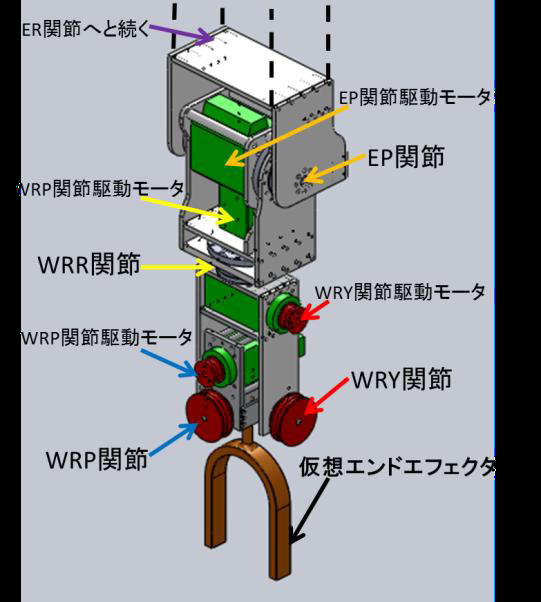
前任者の家事作業における要求仕様の検討結果並びに派遣前における自分自身の検討結果により、各関節の要求仕様を決定した。各関節の要求仕様を表1に、腕の各関節配置を図1に示す。次に、各関節配置を基にして腕の剛体リンクモデルの作成を行った。さらにこのリンクモデルを用いて、実際の作業を想定した重量がリンク先端に付加されているものとして各関節モータに要求される出力トルクの見積もりを行った。各関節を駆動させるために必要なモータの出力トルクを算出したので、これも基にWRY関節からモータ及び減速機構・伝達機構の選定を行い、各関節の配置や関節回転角範囲を確認するための検討図を描いた。この検討図に基づいて3D CAD上ソフトで詳細な設計モデルの作成を行った。3D CADソフトにはSolid Works2010を使用した。3D CAD上の設計モデルでは、各関節同士の機構解析、各関節の重心位置・重量の測定に基づいたモータ出力の妥当性の確認を行った。これらの解析や確認の結果により設計モデルを修正し、より詳細な設計モデルの作成を行った。今回の派遣では、WRP関節・WRY関節・WRR関節・EP関節まで設計モデルの作成を行った。
表1.各関節要求仕様
| 関節名(和名) | 関節名 | 略称 | 回転角範囲[°] | 関節角速度[°/sec] |
|---|---|---|---|---|
| 手首折れ関節1 | Wrist joint Pitch | WRP | 0~120 | 360 |
| 手首折れ関節2 | Wrist joint Yaw | WRY | 0~90 | 360 |
| 手首旋回関節 | Wrist joint Roll | WRR | 0~180 | 360 |
| 肘折れ関節 | Elbow joint Pitch | EP | 0~135 | 130 |
| 肘旋回関節 | Elbow joint Roll | ER | 0~140 | 250 |
| 肩振り上げ関節 | Shoulder joint Yaw | SY | 0~180 | 200 |
| 肩旋回関節 | Shoulder joint Pitch | SP | 360 | 200 |
| 可搬重量[kg] | 2 | |||
| 可搬重量負荷位置[mm] | 50 |
国際化に関する所感及び提言
今回の派遣は私にとって初めての海外であり戸惑うことが多かった。特に、日本国内ではあまり英語に触れる機会がなかったため、最初はコミュニケーションをとるのにも苦労をした。しかし現地で生活していくうちに英語でのコミュニケーションに慣れることができた。また、タイで私をサポートしてくれた学生がラオスからの留学生であったため、現地留学生ネットワークを通じてタイの学生だけではなくベトナムやカンボジアといった様々な国の学生と交流を持つことができ、タイだけではなくほかの国の文化にも触れることができた。
最後に、このような機会を与えてくださった国際交流センターや国際企画の方々、指導教員である金森哉吏准教授、青山尚之教授、派遣先の教授であるTaworn准教授、タイでサポートをしてくれた友人たちに深く感謝いたします。
作成日:2012年10月17日 / 更新日:2012年10月18日